
CAO Wen-ao, PhD, postdoctoral, associate professor, doctoral supervisor, deputy head of the Department of Mechanical Engineering, is selected as CUG Scholar – Young Top Talent and selected into Hubei Youth Science and Technology Program and is a government-sponsored visitor at the Robotics Laboratory of Laval University, Canada, and has won the Second Prize in Natural Science from the Ministry of Education
He is mainly engaged in the research on robot intelligent equipment and is the lecturer of “Robot Technology” for undergraduate students and “Frontiers of Robotics and Equipment” for postgraduates. He has presided over the General Program of the National Natural Science Foundation of China, Youth Program, No. 10 Special Grants of China Postdoctoral Science Foundation, and No. 58 General Grants of China Postdoctoral Science Foundation, Wuhan Knowledge Innovation Program and 5 enterprise-sponsored programs, published more than 20 SCI papers in domestic and overseas top and respected journals, and was authorized more than 40 invention patents and 5 software copyrights. He is the reviewer of the three top international journals in his research fields, including ASME Journal of Mechanical Design, ASME Journal of Mechanisms and Robotics, and Mechanism and Machine Theory, as well as the communication review expert of the National Natural Science Foundation of China. He has edited one academic monograph
Contact information:
Email: cwao1986 @163.com
TikTok: aorobot (some publicly available online presentations of research results)
Research fields:
1. Robot complete system (structure/mechanism + control + vision/deep learning, close integration of theory and application):
(1) Robot mechatronics integrated control system, robot motion control algorithm, robot human compliance control algorithm, trajectory smoothing control, development of robot control system based on C++, Qt and C #. (Features: Not purely theoretical control algorithms, all algorithms can be applied in practice, and some motion control algorithms have been transferred to well-known controller manufacturers in China)
(2) Robot 2D/3D machine vision, deep learning based on multilayer neural networks incorporating physical information, reinforcement learning and imitation learning for robot grasping and running actions. (Features: Highly integrates motion control and visual/deep learning, builds network algorithms and training models from the underlying logic, rather than simply copying existing networks)
(3) System development of parallel/hybrid robots, medical surgical robots, aircraft engine detection continuum robots, nuclear environment detection robots, humanoid robotic arms, biomimetic robots, soft robots, exoskeleton robots, variable stiffness robots, etc.
2. Aerospace folding and unfolding equipment design
Design and performance optimization of large satellite folding and unfolding antenna, aerospace extension arm and synthetic radial radar antenna for major national needs, unfolding dynamics control and engineering application.
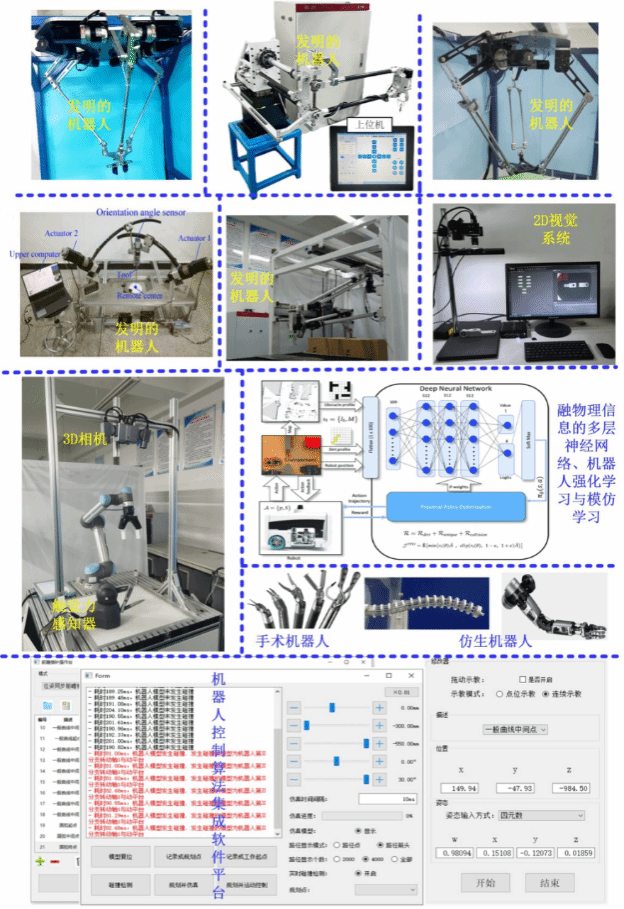
The group’s research in the field of robotics
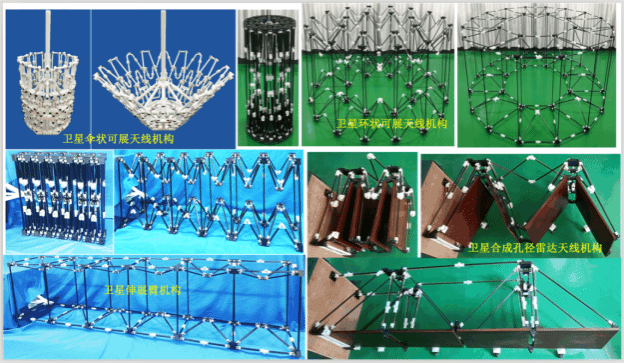
The group’s research in the field of aerospace engineering
He is the overall leader of the dean's team in the field of robotics technology and has independently developed various high-end robot systems. In CUG, the team has the most comprehensive robot technology and the most profound technical foundation. The group features an organic combination of theory and practice, with each student participating in a complete study of a complete set of systems for robotics. (The applicants can inquire about the quality and academic ability of their supervisors from current students)
One doctoral student and four master’s students are admitted each year. Welcome the students who are diligent, practical and interested in robotics and intelligent automation technology. The master programs mainly focus on robotic intelligent automation system design (including body structure design, control system software and hardware design, advanced control algorithms, machine vision, deep learning, intelligent perception and compliance control, and robot hand-eye coordination for intelligent grasping, sorting, operation, etc.). Some research results are available at TikTok (aorobot).
Employment after graduation: our students are very popular as they can not only master the cutting-edge robotics theory, but also have rich hands-on exercise. The graduated students have been employed by high-tech enterprises and research institutes, or continue to study for the doctoral degree.
We maintain close academic exchanges with the University of British Columbia (UBC), Laval University (Canada), University of Duisburg-Essen (Germany) and University of Toronto (Canada). We can recommend outstanding students to pursue doctoral degree or go abroad for exchanges.
Undergraduate Students Supervised:
Cai Yanpu: Kinematics and curved surface machining simulation of new five-axes serial-parallel machine tool. 2016. Excellent bachelor thesis of Hubei Province.
Wang Zeyu: Inverse kinematics analysis and structure design of 3-PRRU parallel spindle head. 2018. Excellent bachelor thesis of China University of Geosciences (Wuhan).
Wei Yanfeng: Design and research of writing robot based on planar 5R mechanism with multiple hinges mechanism. 2019. Excellent bachelor thesis of China University of Geosciences (Wuhan).
Zhang Qing: ROS-based smooth trajectory planning for UR collaborative robots. 2022. Excellent bachelor thesis of China University of Geosciences (Wuhan).
Lai Jingpei: Speed look-ahead trajectory smoothing control algorithm for six-degree-of-freedom robot. 2023. Excellent bachelor thesis of China University of Geosciences (Wuhan).
Postgraduate students supervised (14 students at school, assistant supervisor for 2 doctoral students. 1 doctoral student and four master’s students are admitted each year):
Yang Donghao: Configuration innovation design and performance analysis of space deployable equipment, national scholarship for postgraduate, 2019 excellent master thesis of China University of Geosciences (Wuhan).
Publications:
1. Cao Wen-ao, Cheng Peng, Design and kinematic analysis of a novel deployable antenna mechanism for synthetic aperture radar satellites, ASME Journal of Mechanical Design, 2022, 144(11): 114502 (SCI, top journal in his research field)
2. Zhaoran, Meng, Cao Wen-ao*, Huafeng Ding. A new six degree-of-freedom parallel robot with three limbs for high-speed operations, Mechanism and Machine Theory, 2022, 173: 104875 (SCI, top journal in his research field)
3. Cao Wen-ao, Sheng Xi, Ding Huafeng. Design and kinematics of a novel double-ring truss deployable antenna mechanism, ASME Journal of Mechanical Design, 2021, 143:124502 (SCI, top journal in his research field)
4. Peng Cheng, Huafeng Ding, Cao Wen-ao*, Clément Gosselin, Mingchao Geng. A novel family of umbrella-shaped deployable mechanisms constructed by multi-layer and multi-loop spatial linkage units. Mechanism and Machine Theory, 2021,169: 104169. (SCI, top journal in his research field)
5. Cao Wen-ao, Jing Ziqing, Ding Huafeng. A general method for kinematics analysis of two-layer and two-loop deployable linkages with coupling chains. Mechanism and Machine Theory, 2020. 152:103945 (SCI, top journal in his research field)
6. Cao Wen-ao, Zhang De, Ding Huafeng. A novel two-layer and two-loop deployable linkage with accurate vertical straight-line motion, ASME Journal of Mechanical Design, 2020, 142(10): 103301 (SCI, top journal in his research field)
7. Cao Wen-ao, Xu Shi-jie, Rao Kun, Ding Tengfei. Kinematic design of a novel two degree-of-freedom parallel mechanism for minimally invasive surgery. ASME Journal of Mechanical Design, 2019, 141(10): 104501 (SCI, top journal in his research field)
8. Cao Wen-ao, Ding Huafeng, Zhu Weiguo. Stiffness modeling of overconstrained parallel mechanisms under considering gravity and external payloads. Mechanism and Machine Theory, 2019,135: 1-16 (SCI, top journal in his research field)
9. Cao Wen-ao, Yang Donghao, Ding Huafeng. Topological structural design of umbrella-shaped deployable mechanisms based on new spatial closed-loop linkage units. ASME Journal of Mechanical Design, 2018, 140(6): 062302. (SCI, top journal in his research field)
10. Cao Wen-ao, Yang Donghao, Ding Huafeng. A New Family of Deployable Mechanisms Derived From Two-Layer and Two-Loop Spatial Linkages With Five Revolute Pair Coupling Chains. ASME Journal of Mechanisms and Robotics, 2017,9(6): 061016. (SCI, top journal in his research field)
11. Cao Wen-ao, Ding Huafeng, Yang Donghao. A method for compliance modeling of five degree-of- freedom overconstrained parallel robotic mechanisms with 3T2R output motion. ASME Journal of Mechanisms and Robotics, 2017, 9(1):011011. (SCI, top journal in his research field)
12. Cao Wen-ao, Ding Huafeng. A method for solving all joint reactions of 3R2T parallel mechanisms with complicated structures and multiple redundant constraints. Mechanism and machine Theory, 2018, 121:718-730 (SCI, top journal in his research field)
13. Cao Wen-ao, Yang Donghao, Ding Huafeng. A method for stiffness analysis of overconstrained parallel robotic mechanisms with Scara motion. Robotics and Computer-Integrated Manufacturing, 2018,49:426-35. (SCI, respected journal in his research field)
14. Cao Wen-ao, Ding Huafeng. A method for stiffness modeling of 3R2T overconstrained parallel robotic mechanisms based on screw theory and strain energy. Precision Engineering, 2018, 51:10-29. (SCI, respected journal in his research field)
15. Cao Wen-ao, Ding Hufeng, Chen Ziming, Zhao Shipei. Mobility analysis and structural synthesis of a class of spatial mechanisms with coupling chains. Robotica, 2016, 34: 2467-85. (SCI, respected journal in his research field)
16. Cao Wen-ao, Ding Huafeng, Chen Ziming, Ziming. New Structural Representation and Digital-Analysis Platform for Symmetrical Parallel Mechanisms. International Journal of Advanced Robotoc Systems, 2013,10:1-10. (SCI, respected journal in his research field)
17. Ding Huafeng, Cao Wen-ao, Cai Changwang, Kecskemethy, A.. Computer-Aided Structural Synthesis of 5-Dof Parallel Mechanisms and the Establishment of Kinematic Structure Databases. Mechanism and Machine Theory, 2015, 83: 14-30. (SCI, top journal in his research field)
18. Ding Huafeng, Cao Wen-ao, Andrs Kecskeméthy, Huang Zhen. Complete Atlas Database of 2-DOF Kinematic Chains and Creative Design of Mechanisms. ASME Journal of Mechanical Design, 2012, 134(3): 31006. (SCI, top journal in his research field)
19. Ding Huafeng, Cao wen-ao, Chen Ziming, Kecskemethy, A.. Structural Synthesis of Two-Layer and Two-Loop Spatial Mechanisms with Coupling Chains. Mechanism and Machine Theory, 2015, 92: 289-313. (SCI, top journal in his research field)
20. Chen Ziming; Cao, Wen-ao; Ding, Huafeng; Huang, Zhen. Continuous motion of a novel 3-CRC symmetrical parallel mechanism. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2016, 230(3): 392-405. (SCI, respected journal in his research field)
21. Cao Wen-ao, Ding Huafeng, Chen Ziming, Huang Zhen. Principle of Mobility Analysis of Two-level and Two-loop Spatial Mechanisms with Coupling Chains. Journal of Mechanical Engineering, 2016:116-26. (EI)
22. Yang Donghao, Cao Wen-ao*, Ding Huafeng, Configuration synthesis of a group of umbrella-like deployable mechanisms based on a new two-layer and two-ring linkage, Journal of Mechanical Engineering, 2019 (EI)
23. Chen, Ziming; Cao, Wen-ao; Huang, Zhen. Kinematics analysis of a new 3-DOF rotational parallel mechanism. Proceedings of the ASME Design Engineering Technical Conference, 2012, pp: 573-578. (EI)
24. Chen, Ziming; Cao, Wen-ao; Huang, Zhen. Type synthesis of 3-DOF rotational parallel mechanisms with no intersecting axes. Proceedings of the ASME Design Engineering Technical Conference, 2012, pp:565-572. (EI)
25. Chen, Ziming; Ding, Huafeng; Cao, Wen-ao; Huang, Zhen. Axodes analysis of the multi DOF parallel mechanisms and parasitic motion. Proceedings of the ASME Design Engineering Technical Conference , 2013, IDETC/CIE. (EI)
26. Chen Ziming, Huang Zhen, Cao Wen-ao. Geometric expression of axodes of spatial lower mobility parallel mechanism. Journal of Yanshan University, 2012, 36(2): 113-118
Scientific Research Programs:
1. General Program of the National Natural Science Foundation of China (No. 51875538), 2019/01-2022/12, RMB 600,000Yuan, PI.
2. Youth Program of the National Natural Science Foundation of China (No.51505438), 2016/01-2018/12, RMB 210,000Yuan, PI.
3. No. 10 Special Funding of China Postdoctoral Science Foundation (No.2017T100590), 2017/09-2019/12, RMB 150,000Yuan, PI.
4. Wuhan Knowledge Innovation Program, 2022/06-2024/12, RMB 200,000Yuan, PI.
5. Enterprise-sponsored program, “Development of high-precision motion control algorithm for multi axis robots”, 2023/10-2025/10, RMB 500,000Yuan, PI
6. Enterprise-sponsored program, “Development of rigid-flexible coupled multi-degree-of-freedom surgical robot”, 2022/10-2024/06, RMB 580,000Yuan, PI.
7. Enterprise-sponsored program, “Large assembly line automation program design”, 2022/05-2023/12, RMB 225,000Yuan, PI.
8. Student Pilot Program of China University of Geosciences: “Development of high-speed and high-precision six-degree-of-freedom parallel robot for 3C assembly”, 2022/05-2024/12, RMB 100,000Yuan, advisor.
9. Enterprise-sponsored program, Development of automatic omni-directional positioning device for tunnel detection, 2021/12-2023/12, PI.
10. Youth Science and Technology Program of Hubei Province, 2019/12-2021/06, PI.
11. General Program of No. 58 Postdoctoral Science Foundation of China Postdoctoral Foundation (No. 2015M582302), 2016/01-2018/12, PI.
12. Open fund of Jiangsu Key Laboratory of Advanced Manufacturing Technology (HGAMTL-1604). 2016/12-2018/12, PI.
13. Fundamental New Youth Research Funds for the Central Universities (CUG160825). 2016/01-2017/12, PI.
14. Enterprise-sponsored program, “Development of Omni-directional Automatic Measuring Device”, 2021/11-2022/06, PI.
Awards:
2022 Second Prize in Natural Science, Ministry of Education
2019 Excellent Bachelor Thesis Advisor of CUG
2019 Excellent Master Thesis Advisor of CUG
2018 Excellent Bachelor Thesis Advisor of CUG
2022 Excellent Bachelor Thesis Advisor of CUG
2023 Excellent Bachelor Thesis Advisor of CUG
2022 Outstanding Internship Advisor of CUG
2019 Outstanding Party member of the School
2021 Outstanding Party Worker of the School
2022 Outstanding Party member of the School
2017 Outstanding Class Adviser of CUG (Wuhan)
2017 Advanced Individual in Intellectual Property Protection and Technology Transfer of CUG
2017 Excellent Bachelor Thesis Advisor of Hubei Province
2014 National Scholarship for Doctoral Students
2012 National Scholarship for Doctoral Students
Selected Invention Patents (more than 30 invention patents registered as the first inventor)
1. Cao Wen-ao, Xu Shijie, Rao Kun. A minimally invasive surgical robot with high deflection ability, invention patent, patent No.: 201711450659.7. authorization date: 2020/05/01
2. Cao Wen-ao, Ding Huafeng, et, al. A three-degree-of-freedom heavy-duty translational handling robot mechanism. Invention patent, patent No.: ZL201510856198.8, authorization date: 2017/02/01
3. Cao Wen-ao, Ding Huafeng, et, al. A six-degree-of-freedom heavy-duty robot mechanism with translational and rotational decoupling. Invention patent, patent No.: ZL201510853375.7, authorization date: 2017/02/01
4. Cao Wen-ao, Ding Huafeng, et, al. A six-degree-of-freedom heavy-duty leveling robot mechanism. Invention patent, patent No.: ZL201510853381.2, authorization date: 2017/05/10
5. Cao Wen-ao, et, al. A five-axis serial-parallel machine tool, Invention patent, patent No.: ZL201610514751.4, authorization date: 2018/05/10
6. Cao Wen-ao, et, al. A six-degree-of-freedom serial-parallel assembly robot, Invention patent, patent No.: ZL201710865007.3, authorization date: 2019/12/17
7. Cao Wen-ao, et, al. A closed-loop linkage element with a coupling branch chain and the umbrella-like deployable mechanism based on it, Invention patent, patent No.: ZL201710114228.7, authorization date: 2019/12/17