On October 25, 2022, at the invitation of Professor Ding Huafeng, Dean of the School of Mechanical Engineering and Electronic Information, Zhao Huichan, an associate professor of Tsinghua University and Xu Tiantian, a researcher at Shenzhen Institute of Advanced Technology, Chinese Academy of Sciences delivered online academic reports to our teachers and students at 10:00 a.m. and 2:00 p.m. respectively. The reports were hosted by Ms. Li Min and Ms. Jiang Shulan respectively, and were attended by more than 500 teachers and students.
Prof. Zhao Huichan delivered an academic report entitled “Flexible Artificial Muscle Technology and Its Robotic Applications”. She firstly introduced in detail the history and development status of flexible actuator of dielectric elastomer, and introduced the research significance of flexible drive technology and the practical application of this technology in the high-performance general-purpose artificial muscle-related fields of soft robots: flexible tactile sensor array, micro flying robot, and sub-centimeter scale in-pipe inspection robot through the comparison of rigid and soft robots. She also vividly showed their recent research achievements in the preparation, modeling, design and robot application of such actuators. Finally, Prof. Zhao Huichan made a prospect for the future development of flexible artificial muscle technology and its robotics applications.

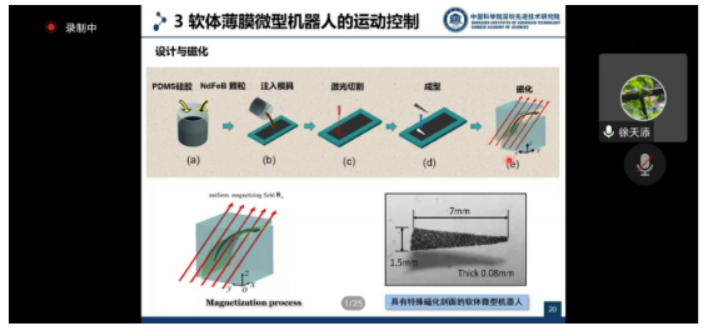
Researcher Xu Tiantian has carried out long-term systematic research in magnetic driven micro-robot, improved the motion efficiency of micro-robot through optimization design, and solved the multi-mode motion problem of soft micro-robot. She made a report entitled “Multi-modal motion and cooperative control of magnetic driven soft film micro-robot”, which focused on the motion control of the soft film micro-robot, introduced the 3D path tracking control of the magnetic driven spiral micro-robot and the soft film micro-robot, as well as the multi-modal motion mechanism for complex environment. It is a big challenge for micro-robots to make different motions and work together in the same external magnetic field. The anisotropic nature of a single micro-robot is the key to controlling the motion of multiple micro-robots in the same magnetic field. Based on the study of magnetization direction and motion efficiency of soft robots, the heterogeneous magnetization direction of thin-film robots is designed to control the speed difference of different micro-robots to achieve cooperative control. The final realization of independent position control of four soft film micro-robots and independent path control of three micro-robots provides a theoretical basis and technical basis for the synergistic targeting of soft film micro-robots in living organisms.
At the end of the presentation, Prof. Zhao Huicheng and Researcher Xu Tiantian had in-depth exchanges and answers to the questions raised by the teachers and students.
School of Mechanical Engineering and Electronic Information
Oct. 25, 2022