·Team members: Ding Huafeng, Cao Wenao, Wu Chuan, Ge Mingfeng, Li Min, Gan Jinqiang
·Research fields: Structure design, mechanical structure design, robot technology, motion control sensor technology
·Advantages and features: Design and control of complex mechanical equipment and robot core motion mechanism, such as parallel robot equipment, construction machinery and equipment (face-shovel hydraulic excavator), aerospace deployable antenna mechanism, forging manipulator, displacement / force sensor, automatic transmission, etc.
Major Programs of the Team in Recent Years
·1 program supported by the National Natural Science Foundation of China for the Outstanding Youth
·5 general programs and 4 youth programs of the National Natural Science Foundation of China
·1 Major Science and Technology Project of Hubei Province
·1 program supported by Special Fund of China Postdoctoral Science Foundation and 1 general program
Main Research Achievements of the Team
· More than 80 SCI papers
· More than 50 granted national invention patents; more than 20 approved software copyrights
· One monograph
Mechanical equipment and robot developed based on the new mechanism invented by the team:
Large face-shovel hydraulic excavator |
Automobile gearbox |
Umbrella deployable antenna mechanism |
Forging manipulator |
Parallel surgical robot |
Latest Advances of the Team
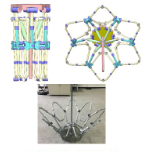
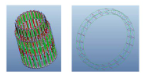
According to the two main forms of large space-borne deployable antenna, new deployable antenna mechanisms are developed:
Space-borne parabolic antenna |
Space-borne loop antenna |
Newly developed parabolic deployable antenna mechanism
Newly developed loop deployable antenna mechanism |